
La mission Mars Science Laboratory comprend un rover nommé Curiosity. Il est la forme évoluée et survitaminée des Mars Exploration Rover. Il reprend bon nombre d'instruments présents dans cette mission, et en ajoute d'autres plus performants. Le but de Curiosity est clair : trouver des traces de vie passée ou présente sur Mars. De plus, un instrument sera chargé de déterminer la quantité de radiation qu'un humain pourrait recevoir, en vue d'une plus ou moins probable installation de l'homme sur Mars.
C'est une mission dont l'organisation a été longue. En effet, à peine Spirit et Opportunity avaient posés leurs roues sur la surface poudreuse de la planète rouge qu'il était déjà question d'un rover de taille plus grande, aux capacités de déplacements meilleures, avec un éventail d'instrumentation plus important.
Voici une photographie de Curiosity. Notez le gain en volume par rapport aux MER.

Crédits : NASA/JPL/CALTECH
Ce rover n'est pas alimenté par panneaux solaires, mais par MMRTG (Multi-Mission Radioisotope Thermoelectric Generator, un générateur à radio-isotopes). Le grand avantage par rapport au solaire c'est que l'engin pourra être alimenté de façon très stable, et effectuer des manoeuvres quel que soit le moment du sol, même de nuit. En cas de tempête de sable, pas de problèmes non plus. Cela devrait éviter un certain nombre de problèmes qu'ont connu Spirit et Opportunity (ensablement des panneaux, perte de luminosité suite à une atmosphère opacifiée par les poussières).
Les roues sont plus larges, cela devrait éviter quelques enlisements, mais surtout, la distance que pourra couvrir Curiosity en est grandement accrue. Le boggie reste identique aux MER mais il est aussi plus gros, plus robuste. Le sonde devrait pouvoir franchir des obstacles plus gros.
Le lancement et le voyage
Curiosity a été lancée le 26 Novembre 2011 à 16h02 heure légale française (soit 15Hh02 TU). Celui-ci a eut lieu depuis Cap Canaveral, et s'est effectué avec une fusée Atlas V. Une fois expédiée sur son orbite vers Mars, Curiosity a entamé un voyage de 8 mois pour se poser avec succès sur Mars le 6 Août 2012, en fin de nuit depuis la France.
Entrée, descente et atterrissage
La chronologie des évènements, en diaporama.
Cliquez sur la première vignette pour faire défiler le diaporama.






Crédits : NASA/JPL-Caltech
Site d'atterrissage
Curiosity s'est posée dans le cratère Gale. Un grand cratère qui semble présenter des conditions favorables à une brève apparition de la vie. Il montre aussi des traces évidente d'eau passée, mais aussi présente, avec notamment un cratère "splotch", à l'Ouest du site d'atterrissage. Le rover se posera dans la zone Ouest Nord-Ouest du cratère Gale, dans une plaine qui présente des cratères plus petits et aussi plus récents. La montagne centrale de Gale surplombe la plaine de plusieurs milliers de mètres, le Mont Sharp, exposant une grande quantité de strates et de roches d'époques variées. Cela pourrait être l'objectif à long terme du rover.
Voici une carte de l'ellipse d'atterrissage de Curiosity (cliquer sur l'image pour afficher le grand format (2.7 Mo). En rouge, l'ellipse d'atterrissage corrigée en Juin 2012, plus réduite et plus proche du Mont Sharp, au centre du cratère.
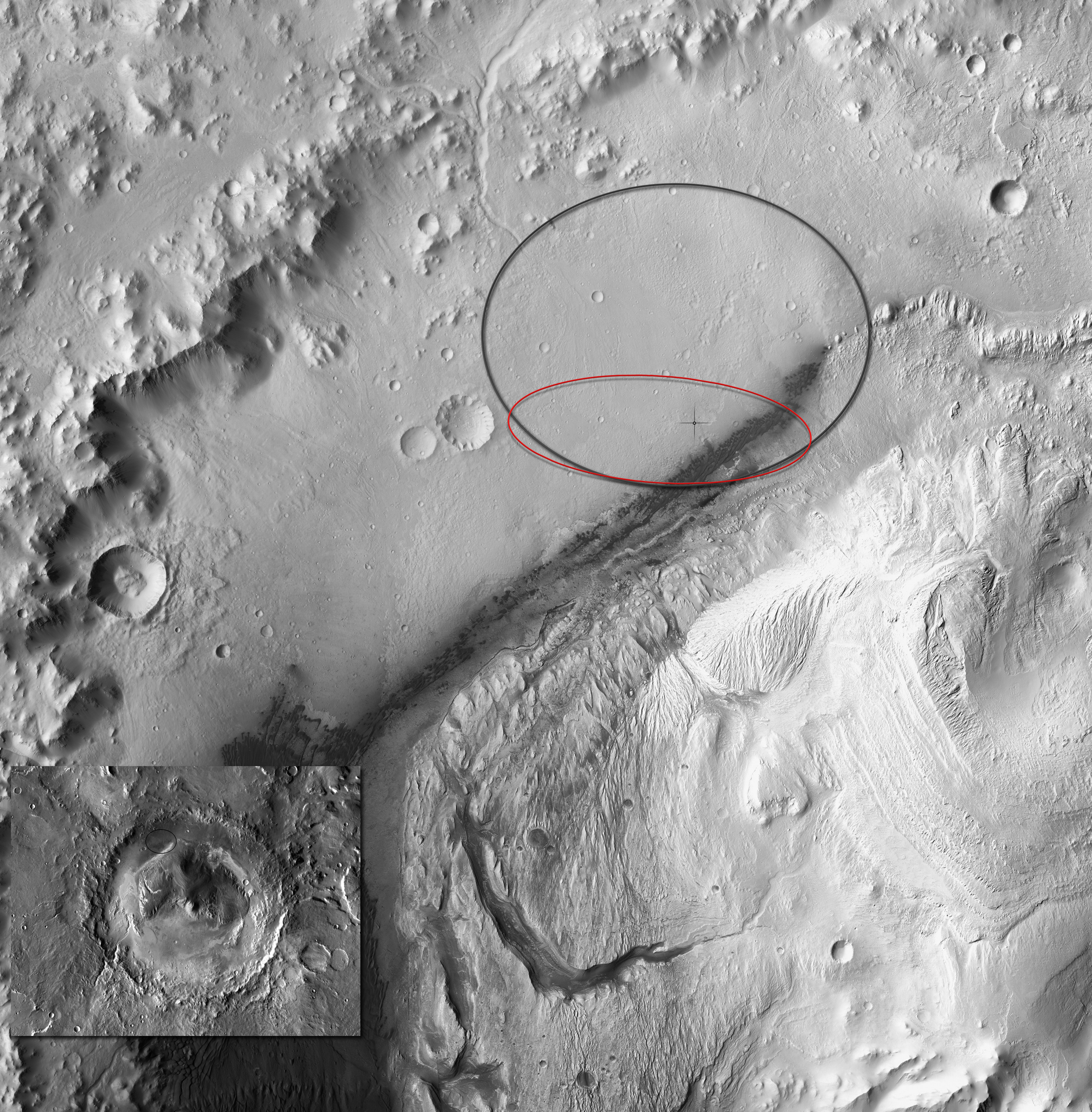
La sonde Mars Reconnaissance a survolé le site le sol suivant et a pris cette image du site d'atterrissage, où l'on peut voir les différents élements de l'entrée, descente et atterrissage sur le sol.

Les caméras
Venons en maintenant au coeur du sujet car c'est l'objet de ce site : l'imagerie des rovers martiens.
Jamais sur Mars n'aura été embarqué autant de matériel d'imagerie, avec une telle puissance et une telle qualité. Si les caméras de Spirit et Opportunity étaient une belle évolution, celles de Curiosity sont clairement une révolution. Pas tellement au niveau de l'imagerie de navigation, car les mêmes NavCam sont embarquées par le rover, avec toutefois quelques menues amélioration par rapport aux précédentes dont un chauffage qui pourra permettre des prise de vue à température plus basse. Petit détail, mais qui a son importance : il n'y a pas une caméra pour chaque oeil, mais deux. En effet, si une caméra présente des défauts ou est endommagée, la suivante pourra prendre le relai. L'angle de champs ne change pas, avec 45°. Ces caméras sont situées à 1.9 mètre au dessus de la surface, contre 1.6 mètre pour MER). Focale de 14.67 mm, avec capteur CCD noir et blanc.
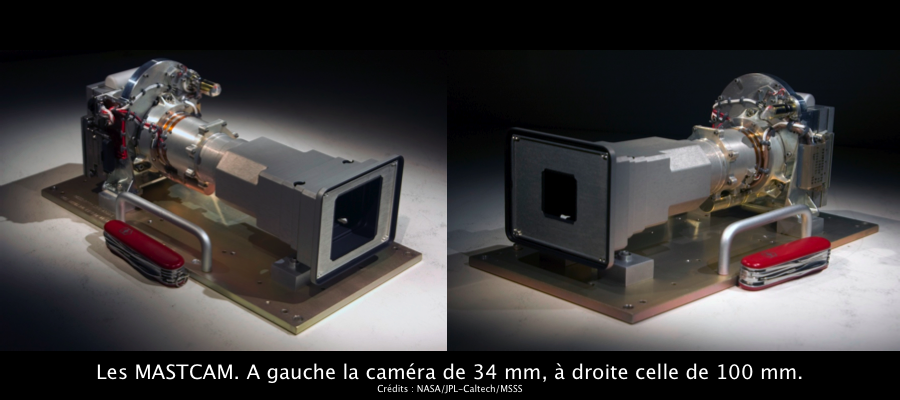
Non, le changement ne vient pas des NavCam, mais de caméras scientifiques. Il y en a deux, nommées MastCam (car montées sur le mât). Celles-ci embarquent tout d'abord des optiques de meilleure qualité que les PanCam de MER. La première caméra possède une focale de 34 mm fermée à f/8, procurant un champs de vision de 15 par 20° (légèrement plus large que Pancam). Cette dernière se nomme "Mastcam-34". La suivante possède un véritable téléobjectif, de 100 mm, fermé à f/10. Le champs de vision est de 5.1° x 6.8°. C'est la "Mastcam-100". Les capteurs sont aussi nettement meilleurs, offrant une résolution native de 1200*1600 pixels (contre 1024*1024 pour la Pancam). Les capteurs pourront délivrer une image en couleur, sans l'usage de filtres, grâce à la présence d'une CCD à matrice de Bayer. Toutefois, ce capteur pourra basculer en mode noir et blanc pour l'acquisition d'images en couleur via une roue à filtres colorés, et pour l'imagerie UV et IR. LE RVB par filtres sera possible avec les deux caméras, mais d'autres longueurs d'ondes ne seront disponibles que sur l'une ou l'autre des caméras. Enfin, cerise sur le gâteau, ces caméras offrent la possibilité de filmer véritablement la surface de Mars, en capturant des vidéos en HD 720p, à 8 images par secondes. Chaque caméra possède enfin une mémoire tampon de 8 Gigabits, permettant le stockage temporaire de 4.200 clichés bruts (format non compressé).
Voici les deux merveilles d'imagerie qui seront embarquées sur Mars.
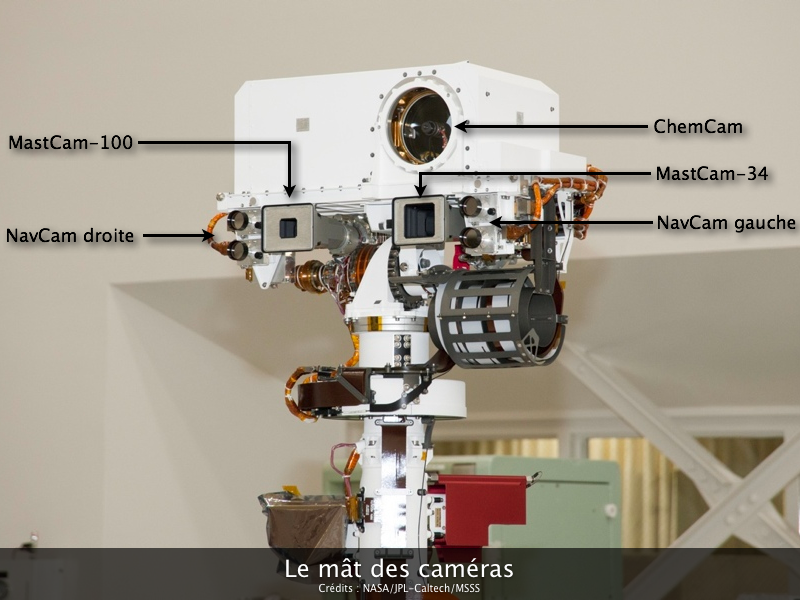
Et leur localisation sur le mât des caméras, entre les caméras de navigation, et sous le gros boitier blanc qui contient le ChemCam, à la fois caméra et instrument car embarquant un rayon laser qui peut frapper une roche à distance pour en dresser le rapide portrait chromatographique.
N'oublions la caméra nommée "MAHLI" (Mars Hand Lens Imager) qui est un peu une loupe de géologue, qui embarque une caméra couleur dont l'objectif est entouré de LED pour éclairer la surface à imager. Contrairement à la Microscopic Imager des Mars Exploration Rover, cette caméra possède une distance de mise au point variable, de 20.4 mm à l'infini. Cela veut dire qu'elle sera capable de prendre des vues du paysages, à l'instar de ses consoeurs situées sur le mât. Car MAHLI est située sur le bras robotisé de Curiosity. Et avoir une telle caméra possédant une telle mobilité est vraiment un changement car on peut imaginer que celle-ci prendra des vues du rover d'au dessus, d'en dessous, etc. C'est aussi un instrument idéal pour examiner certains composants du rover. Possibilité d'effectuer des vidéo en 720p à 7 ips, et résolution native d'une image de 1200*1600 pixels, pour un champs de vision de 34° à 39° (selon le zoom employé).
Petite note sur une caméra qui fera parler d'elle lors de la séquence d'entrée, descente et atterrissage : le MARDI (pour MARs Descent Imager). Celle-ci est fixée sur le côté du corps du rover, pointée vers le bas, offrant un champs de vision large de 90°. Elle offrira des images de 1200*1600 pixels, et fera l'acquisition d'une vidéo de la descente à 5 ips, le tout en couleur avec un capteur RVB à matrice de Bayer. Le but de cet caméra est avant tout de déterminer très rapidement où s'est posée Curiosity en se reposant sur les images de la descente. Toutefois, elle pourra aussi prendre des vues du sol une fois la mission entammée.
Signalons enfin que l'avant et l'arrière du rover sont surveillées par des HazCam (Hazard Avoidance Camera), identiques à celles des MER, par paire, servant essentiellement à s'assurer que le terrain est carrossable et utilisées aussi par le système de navigation autonome, qui utilise aussi les Navcam.