A propos
db-prods est propulsé par :





Soyez smart, utilisez des logiciels obtenus librement ET légalement !
Dernièrement
- Occultation des Pléiades par la Lune – 1er Avril 2025 2 avril 2025
- Eclipse solaire – 29 Mars 2025 30 mars 2025
- Coucher d’éclipse lunaire et vapeurs 14 mars 2025
- Meilleurs Vœux 2025 1 janvier 2025
- Meteosat Third Generation – Tentative de traitement 28 octobre 2024
Commentaires récents
Catégories
- ACNH (1)
- Astronomie (383)
- Aurore boréale (3)
- Les Anneaux (38)
- Mars (134)
- NLC (20)
- Pluton (1)
- Rosetta (8)
- Soleil (48)
- Vénus (6)
- Capharnaüm (167)
- Dessin (4)
- Dinkum (1)
- Doctor Who (1)
- Fourmis (6)
- Minecraft (3)
- Paysage (405)
- Rotterdam (53)
- Titanic (8)
- Urbanité (115)
Archives
Les essentiels de l'Astronomie
- Communauté Astronomique Webastro
- Marsrovers Images Mon site web consacré à l’imagerie des rovers de Mars !
- SpaceWeather Pour connaître le temps qu’il fait entre l’atmosphère et le reste de l’univers
- The Planetary Society
- Unmanned Spaceflight ⚠️ Ferme fin 2024. Les forums anglophone d’UMSF, LE point central de la communauté de passionné-es de vols spatiaux inhabités.
Météo & Photo
- Eumetview Interface de visualisation des données satellites européen
- Infoclimat – La météo en temps réel LE site francophone de la météo, très riches en informations, documentations et très actif.
- Mes photos chez Flickr Vous retrouverez mes meilleures photos, classées par albums, intérêt, région.
Méta
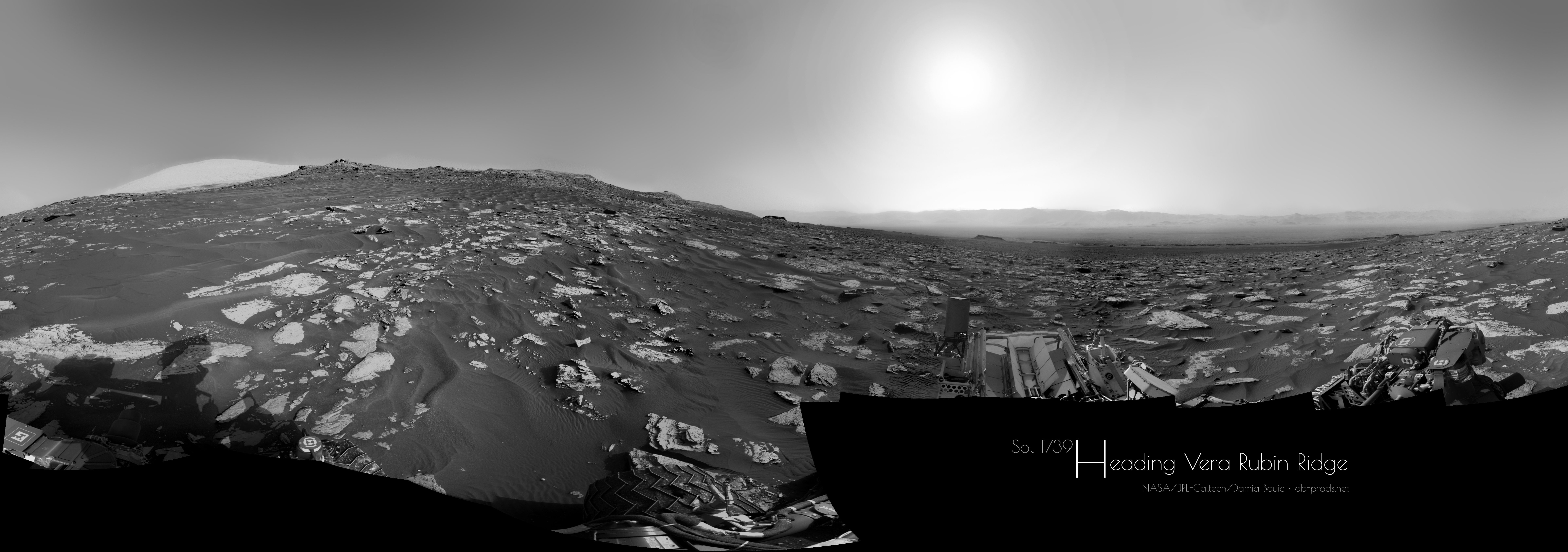
Curiosity avance doucement mais surement en direction de la prochaine étape de sa mission : la crête Vera Rubin, intéressante pour son hématite (un minéral qui se forme notamment en présence d’eau). La vue se dégage de plus en plus sur le cratère Gale car le rover prends de la hauteur.
Curiosity is driving slowly but surely toward the next leg of her mission : Vera Rubin Ridge, interesting for its hematite (a mineral found to be made in places containing water). The view is getting to be better an better on Gale crater, because the rover is climbing, actually.
Au Sol 1601 de sa mission, Curiosity a fait un petit arrêt à la lisière d’un champs dunaire appartenant au complexe de dunes nommé Bagnold. Une vue magnifique sur un champs de sable s’offrait à la caméra Mastcam qui en a profité pour en faire un panorama couleur complet du site. Sur cette carte postale je propose une vue cadrée sur les dunes et sur le Mont Sharp. Je ne pouvais pas faire l’impasse sur une telle production.
On Sol 1601, Curiosity has made a little stop just near of a dune field which belongs to a dune complex unformaly named Bagnold. A magnificent view on a field of sand just in front of the Mastcam camera, which taken the opportunity (sic) to make a full color panoramic of the site. On this postcard I propose a framed view on the dunes and Mount Sharp. I cannot avoid to do such a production.

Essayons de faire revenir ce blog à la vie (lol…).
Alors, au Sol 1611 (hier, soit le 16 Février), Curiosity a acquis une petite mosaïque Navcam de fin d’après-midi. Le but était d’obtenir l’ombre du rover devant le Mont Sharp. Malheureusement, trop de poussière dans l’atmosphère, le Soleil était trop atténué et aucune ombre n’était visible. Toutefois le panorama offre une jolie ambiance et je n’ai pas pu m’empêcher d’en produire une version colorisée. Vous trouverez ici une version monochrome et la version colorisée. Qui fut un enfer à produire, par ailleurs…
Trying to bring this blog back to life.
So, on Sol 1611 (yesterday, the 16th of February), Curiosity took a little Navcam late afternoon mosaic. The goal was to get the rover shadow in front of Mount Sharp. Sadly, too much dust in the atmosphere, the Sun was too weak to create sharp shadows. But, this panoramic offers us a good mood, and I couldn’t resist to produce a colorized version of it. You will find a greyscale version and a colorized version. Which was hell to produce…

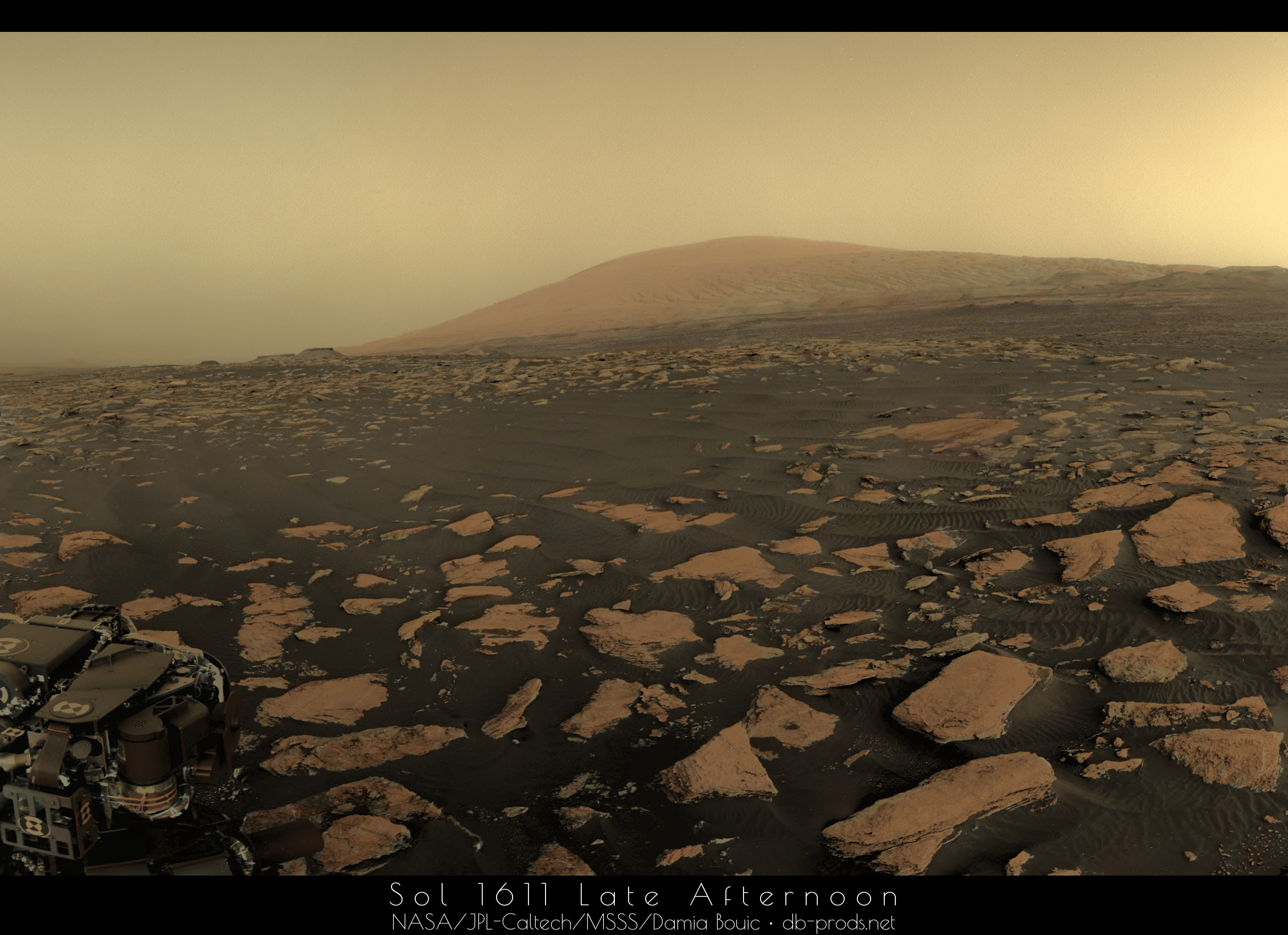
And special thanks to Doug Ellison for the engineering part of this panorama 🙂
A l’occasion des 13 années de présence du rover Opportunity sur Mars, je lance cette mise à jour, sans doute la plus importe depuis le début de Marsrovers Images.
Cette mise à jour apporte un design légèrement revu, avec un menu agrandi, l’arrivée d’une nouvelle typo pour les titres et sous-titres -Poiret One- utilisée également sur mon blog depuis quelques semaines, et dans un soucis d’homogénéité graphique entre mon blog et mon site.
De nombreuses pages ont été revues, voire refondues :
- La page « Imagerie » a été supprimée et une partie de son contenu a été envoyé dans la page de présentation de la mission Mars Exploration Rover ;
- La page Galerie totalement revue. Désormais TOUTES les galeries sont accessibles depuis une seule page, dont le design a été unifié (bannière pour chaque sonde concernée) ;
- La mission Opportunity est à l’honneur dans cette mise à jour car désormais, l’intégralité de ses images sont disponibles sous la forme d’une timeline, exactement comme pour Curiosity. Ainsi, même mes premiers panoramas sont horodatés ;
- La page Tutoriels totalement refondue, sous la forme d’un long article. Les anciens tutoriels de panoramas ont été remplacés par un unique et actualisé (et identique à ma façon de traiter un panorama actuellement) ;
- Quelques changements dans la page de présentation, notamment les publications qui ont été supprimées car ne présentant que des éléments anciens (vieux de 10 ans) ;
- Le menu modifié : MER : La Mission devient Spirit&Opportunity, par cohérence avec les autres sondes qui sont nommées ; l’ordre des items changé.
Mais la grande nouveauté ne se voit ni dans le fond ni dans la forme du site, mais dans sa manière de fonctionner : j’ai converti son intégralité en PHP, afin notamment d’avoir un site beaucoup plus souple et facile à mettre à jour.
Voilà, c’est Marsrovers Images V6, et ça se passe en cliquant sur cette phrase.

Je vous adresse mes meilleurs vœux pour cette nouvelle année 2017. En faisant le vœu que celle-ci soit meilleure que la précédente…
Un constat un peu amer pour cette année passée. Sur plusieurs niveaux. Je ne ferais pas de points statistiques, mais une chose ressort : jamais ce blog n’aura connu aussi peu de visites. Plusieurs raisons, mais une est évidente : le peu de contenu proposé ici. J’ai connu de nombreux passages à vide, des remises en questions, des pertes de confiance, des moments où je voulais tout arrêter, car, notamment en matière d’imagerie martienne, de nouveaux arrivants font un travail excellent, plus efficacement, plus rapidement. Cela fut très dur pour moi, à tel point que j’ai failli cesser mon travail. Je vous en parle car de même qu’il faut parler des bons moments, il faut aussi évoquer les moments moins bons. Et 2016 en fut ponctué de nombreux.
Je met en 2017 une nouvelle confiance, j’ai repris en main mon travail d’imagerie, je ne compte pas le lâcher de si tôt. Et peu importe si des gens qui sont équipés en meilleur matériel, avec de meilleures compétences logicielles, font mieux que moi, je persisterai à produire des cartes postales martiennes. Qu’on se le dise !
Bonne année tout le monde, le meilleur pour vous tous-t-es.
Curiosity a été condamnée à l’immobilité forcée. La raison ? Un défaut dans l’outil de forage situé sur le bras robot. Pour éviter que le problème ne s’envenime, la prudence a voulu que le rover soit immobilisé le temps de trouver la cause de la panne.
Au Sol 1547 et 1552, Curiosity a pris quelques images Navcam du site alentours. J’ai composé un panorama, disponible ici, et je me suis dit qu’il y avait matière à faire une petite carte postale de ce site, nommé Precipice, où la vue est très dégagée en direction du Mont Sharp, montrant toute la zone à sa base. C’est quelque part vers la droite de la montagne que le rover se dirigera, continuant son ascension, nous fournissant sans doute de magnifiques vues.
Curiosity was condemn to immobility. The reason ? An issue in the drilling tool located on the rover arm. To avoid other issues, the team took care to fix the rover position in a while, to diagnose the isssue.
On Sols 1547 and 1552, Curiosity has taken several Navcam images of the landscape. I composed a panorama, available here, and I was telling myself that it could be a good opportunity (haha, inside joke… anyway), to do a Postcard of this place, called Precipice, where the view is very clean toward Mount Sharp and its basis. It’s somewhere to the right of the mountain that the rover will go, continuing her ascending, providing us some beautiful shots.
